시험장비 취급업체, 자동차 부품시험, 성능시험, 신뢰성 시험, 내구성 시험 전문업체
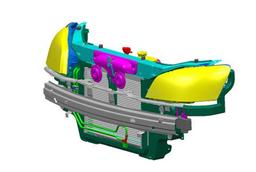
유동환원로(Fluidized reduction furnace) 가스덕트 청소로봇은 고온 및 유해가스로 인해 사람의 접근이 어려운 환경에 적용 가능한 모바일 로봇으로, 극한 환경용이라는 면에서는 GIBBON과 유사하다고 할 수 있습니다.
길이 25m인 gas duct 내부에 퇴적된 고온분진 형태의 환원철(순간온도600℃)을 정해진 목표시간 내에 duct 외부로 이송 혹은 배출하여 제거 할 수 있는 로봇 시스템으로 분진 및 환경온도 90℃에서 연속 운영이 가능하도록 방진과 냉각을 고려하여 제작되었습니다. 로봇은 여러 가지 모드로 동작이 가능합니다. 로봇팔 끝단에 Bucket혹은 Air Suction Tool을 장착할 수 있으며 덤프에 분광을 적재하거나 Air Suction Hose로 직접 수거도 가능합니다.
유압 파워소스로 mHPU(4-module)를 사용하여 출력 대비 전체 시스템을 소형화하여 개발하였으며, 무선 조이스틱을 이용한 사용자의 원격 조작으로 조종됩니다. 내부의 상황을 모니터링 하기 위해 다수의 조명과 카메라를 장착하고 있으며 로봇의 자세와 위치를 감지하기 위한 각종 센서 시스템을 구비하고 있습니다. 또한 충돌 등 비상상황에 대응하는 힘 제어 기능과 로봇의 주행 자세를 실시간으로 보정하는 등의 자율 제어 모드가 가능합니다.
– 본 제품은 포스코의 지원으로 개발되었습니다.


필드로봇의 로봇다리는 로봇의 자중을 이겨내고 주행에 필요한 충분한 토크를 필요로 하므로 유압 엑추에이터 기술의 훌륭한 적용처가 될 수 있습니다.
케이엔알시스템은 한국생산기술연구원 컨소시엄 연구개발인 한국형 견마로봇 ‘진풍’의 개발에 참여하여 KNR의 액추에이터와 로봇다리를 설계함으로서 대표적인 필드 로봇의 분야인 국방분야 적용가능성을 높였습니다. 이 다족형 견마로봇에 적용된 구동기는 센서일체형 리니어와 로터리 유압 액추에이터이며 이를 적용하여 다리모듈을 경량을 위하여 최적설계 하였습니다. 현대자동차/로템 컨소시엄 연구개발인 ‘유압형 웨어러블로봇’의 상/하지에 사용되는 엑추에이터등 다양한 보행 로봇의 다리를 위한 연구가 진행되고 있으며, 더 다양한 적용처를 위한 기획과 지속적인 연구를 진행하고 있습니다.

So called wearable robots are announced a lot in the paper and news. As a member of power enhancement robot project, KNR has designed upper body of wearable robot and tested last two years. Each arm handles 20kgf load.


PIBOT (Pipe Inspestion Robot)
배관을 이동하면서 비과괴검사를 수행할 수 있는 배관검사 로봇이 개발되고 있습니다. 배관검사로봇은 배관의 수직관, 곡관, 분지관등 이동이 어려운 관내 환경을 극복하고 무거운 비파괴 모듈을 끌고 검사를 수행해야 합니다.
케이엔알시스템은 가스공사 컨소시엄의 ‘8″ 및 16″ Unpiggable 가스배관 비파괴 검사용 자가추진 로봇 기술개발’에서 로봇부 총괄개발을 담당하고 있습니다. 본 과제에서는 50bar의 실제 사용하고 있는 가스배관 환경내에서 관내의 어려운 장애물을 극복하고 비파괴 검사를 수행하며 무선으로 이동하는 기술을 개발하고 있습니다. PIBOT (Pipe Inspection roBOT)은 각각의 기능을 담당하고 있는 모듈을 뱀처럼 연결한 다관절 로봇으로 개발 진행중입니다.